The WWF is run at a local level by the following offices...
- WWF Global
- Adria
- Argentina
- Armenia
- AsiaPacific
- Australia
- Austria
- Azerbaijan
- Belgium
- Bhutan
- Bolivia
- Borneo
- Brazil
- Bulgaria
- Cambodia
- Cameroon
- Canada
- Caucasus
- Central African Republic
- Central America
- Chile
- China
- Colombia
- Croatia
- Democratic Republic of the Congo
- Denmark
- Ecuador
- European Policy Office
- Finland
O planejamento sistemático da conservação utiliza métodos simples e explícitos para localizar e delimitar novas reservas de modo a complementar o sistema já existente para o cumprimento de metas para conservação de alvos específicos
O PSC auxilia na elaboração de cenários de conservação que contemplem a proteção da biodiversidade e dos ecossistemas, a persistência de espécies, de processos ecológicos e de paisagens, aproveitando as oportunidades de conservação e minimizando custos. Atualmente, as áreas protegidas são planejadas principalmente para os habitats terrestres, deixando de promover a conectividade para organismos aquáticos e comprometendo a proteção da interface entre os dois ambientes. Isso reforça a importância de estudos integrados, que considerem a conectividade dos ambientes ao longo dos rios e a manutenção dos regimes naturais de vazão.
A efetividade do planejamento sistemático da conservação advém da sua eficiência em utilizar recursos limitados para atingir as metas de conservação, sua defensabilidade e flexibilidade em face de usos conflitantes da terra e a possibilidade de revisão crítica das decisões baseadas no sistema. Inicialmente, planejamento sistemático da conservação tem como objetivos buscar a eficiência e indicar o grau de insubstituibilidade, representatividade, complementariedade e flexibilidade (Margules & Pressey 2000). O princípio da eficiência pode ser contemplado de duas formas: se o custo de conservação numa região for homogêneo, o sistema buscará a menor extensão de áreas possível para cumprir as metas. Entretanto, é de se esperar que regiões com características distintas tenham custos diferentes. Deste modo, o sistema busca a solução que apresenta o menor custo de conservação possível para atingir as metas. O princípio da insubstituibilidade pressupõe que algumas áreas são insubstituíveis, porque são as únicas capazes de cumprir as metas estabelecidas para determinados alvos.
A seguir as etapas do planejamento sistemático da conservação:
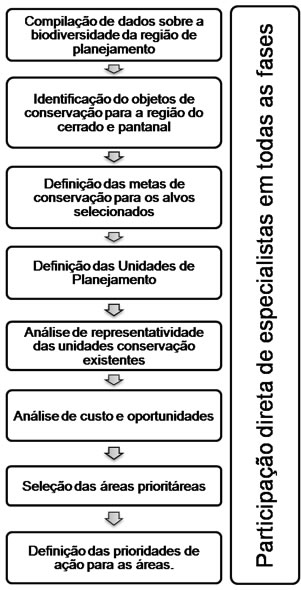
Sequência de etapas do processo de priorização
Os principais dados de entrada podem ser divididos nas seguintes categorias:
Alvos ou objetos de conservação são atributos de interesse para a conservação que ocorrem na região de interesse. Como características necessárias, os alvos devem ser bons indicadores da biodiversidade como um todo e devem ser mapeáveis em escala compatível com o estudo. Os alvos de conservação podem ser espécies, habitats, ecossistemas ou quaisquer outros atributos que representem a distribuição da biodiversidade na área de estudo. Uma premissa importante da análise é que os alvos de conservação e demais atributos escolhidos como alvos sejam bons indicadores da biodiversidade como um todo. Essa premissa é aceitável uma vez que muitas espécies pertencentes ao mais diferentes grupos taxonômicos respondem de forma semelhante às variações no ambiente (Rodrigues e Brooks 2007). Desta forma, espera-se que um conjunto heterogêneo de alvos bem conhecidos do ponto de vista de sua distribuição geográfica e história natural irá representar a biodiversidade como um todo. Trindade e Loyola (2011) testaram o desempenho de diversos grupos de mamíferos como indicadores de biodiversidade (“surrogates”) no Cerrado e na Mata Atlântica e obtiveram o melhor resultado em termos de representatividade quando as espécies de distribuição restrita foram utilizadas como alvos. Isso ocorre porque a área necessária para cumprir a meta de conservação de cada espécie de distribuição restrita cumpre parcialmente a meta de muitas das espécies de ampla distribuição, de modo que raramente é necessária a seleção de áreas exclusivamente para cumprimento de metas destas espécies.
2. Unidades de Planejamento
As unidades de planejamento (UP) são subdivisões do território de estudo capazes de resumir e captar as variações ambientais em escala adequada.
Custo de conservaçãoSabe-se que a conservação possui custos de implementação que variam ao longo do espaço de forma positiva ou negativa. Considerando que o planejamento sistemático da conservação busca alcançar o melhor custo/benefício, uma superfície de custo referente à área de estudo é incluída para que as oportunidades (custos negativos) e as restrições (custos positivos) de conservação de uma área sejam consideradas. Assim, áreas com alguma característica desejável que tenham menor custo são priorizadas pelo sistema em detrimento daquela com maior custo de conservação.
A principal vantagem de se considerar o custo de conservação na escolha de áreas é diminuir o conflito na implementação. Quanto menor o custo do conjunto de áreas prioritárias escolhidas, maior é a probabilidade de sucesso na consolidação da conservação nessas áreas. Os principais conflitos ocorrem nos casos em que existe uma elevada diversidade de espécies e/ou endemismo em áreas importantes para produção agrícola, implementação de infraestrutura, ou regiões de alta densidade populacional.
3. Seleção de cenário – MARXAN
A seleção do melhor cenário baseado na escolha por programa de priorização foi a primeira etapa do processo de priorização de áreas. Esta etapa consiste em selecionar um conjunto de unidades de planejamento que atinjam as metas de conservação e tenham a melhor relação entre o custo de conservação e a borda dos remanescentes. Para o processo de seleção foi utilizado o programa Marxan (Ball, Possingham & Watts, 2009). O Marxan usa um algoritmo de otimização baseado em “simulação de tempera” (Simulated Annealig), que é uma estratégia eficiente para encontrar soluções próximas ao ótimo em problemas de grande complexidade. O algoritmo utilizado pelo Marxan usa uma função objetivo para avaliar conjuntos de unidades de planejamentos e assim buscar uma melhor solução. A função objetivo do Marxan é apresentada a seguir:

Cost = custo associado a unidade de planejamento
BML = constante que multiplica os valores de borda da tabela
Boundary = borda associada a seleção de duas unidades contíguas
CFPF = “Conservation feature penalty factor” penalidade associada ao alvo
Penalty = penalidade por não atingir a meta para um determinado alvo
Cost Threshold Penalty (t) = penalidade aplicada caso o custo exceder um limite pré-determinado
Informações técnicas sobre o funcionamento, estrutura de dados e saídas podem ser obtidos no manual do Marxan, disponível na página oficial do programa - www.uq.edu.au/marxan/.
Conheça os projetos do WWF-Brasil que envolvem PSC
Referências
Ball, I.R., H.P. Possingham, and M. Watts. 2009. Marxan and relatives: Software for spatial conservation prioritisation. Chapter 14: Pages 185-195 in Spatial conservation prioritisation: Quantitative methods and computational tools. Eds Moilanen, A., K.A. Wilson, and H.P. Possingham. Oxford University Press, Oxford, UK.
Margules, C. R. e R. L. Pressey. 2000. Systematic conservation planning. Nature 405: 243-253.
Rodrigues e Brooks 2007 Shortcuts for biodiversity conservation planning: The effectiveness of surrogates. Annual Review of Ecology, Evolution, and Systematics 38: 713–737.
Trindade-Filho J. e R. Loyola. 2011. Performance and Consistency of Indicator Groups in Two Biodiversity Hotspots. PlosOne 6: e19746.
A efetividade do planejamento sistemático da conservação advém da sua eficiência em utilizar recursos limitados para atingir as metas de conservação, sua defensabilidade e flexibilidade em face de usos conflitantes da terra e a possibilidade de revisão crítica das decisões baseadas no sistema. Inicialmente, planejamento sistemático da conservação tem como objetivos buscar a eficiência e indicar o grau de insubstituibilidade, representatividade, complementariedade e flexibilidade (Margules & Pressey 2000). O princípio da eficiência pode ser contemplado de duas formas: se o custo de conservação numa região for homogêneo, o sistema buscará a menor extensão de áreas possível para cumprir as metas. Entretanto, é de se esperar que regiões com características distintas tenham custos diferentes. Deste modo, o sistema busca a solução que apresenta o menor custo de conservação possível para atingir as metas. O princípio da insubstituibilidade pressupõe que algumas áreas são insubstituíveis, porque são as únicas capazes de cumprir as metas estabelecidas para determinados alvos.
A seguir as etapas do planejamento sistemático da conservação:
Sequência de etapas do processo de priorização
Os principais dados de entrada podem ser divididos nas seguintes categorias:
- Alvos de Conservação
- Unidades de Planejamento
- Custo de Conservação
Alvos ou objetos de conservação são atributos de interesse para a conservação que ocorrem na região de interesse. Como características necessárias, os alvos devem ser bons indicadores da biodiversidade como um todo e devem ser mapeáveis em escala compatível com o estudo. Os alvos de conservação podem ser espécies, habitats, ecossistemas ou quaisquer outros atributos que representem a distribuição da biodiversidade na área de estudo. Uma premissa importante da análise é que os alvos de conservação e demais atributos escolhidos como alvos sejam bons indicadores da biodiversidade como um todo. Essa premissa é aceitável uma vez que muitas espécies pertencentes ao mais diferentes grupos taxonômicos respondem de forma semelhante às variações no ambiente (Rodrigues e Brooks 2007). Desta forma, espera-se que um conjunto heterogêneo de alvos bem conhecidos do ponto de vista de sua distribuição geográfica e história natural irá representar a biodiversidade como um todo. Trindade e Loyola (2011) testaram o desempenho de diversos grupos de mamíferos como indicadores de biodiversidade (“surrogates”) no Cerrado e na Mata Atlântica e obtiveram o melhor resultado em termos de representatividade quando as espécies de distribuição restrita foram utilizadas como alvos. Isso ocorre porque a área necessária para cumprir a meta de conservação de cada espécie de distribuição restrita cumpre parcialmente a meta de muitas das espécies de ampla distribuição, de modo que raramente é necessária a seleção de áreas exclusivamente para cumprimento de metas destas espécies.
2. Unidades de Planejamento
As unidades de planejamento (UP) são subdivisões do território de estudo capazes de resumir e captar as variações ambientais em escala adequada.
Custo de conservaçãoSabe-se que a conservação possui custos de implementação que variam ao longo do espaço de forma positiva ou negativa. Considerando que o planejamento sistemático da conservação busca alcançar o melhor custo/benefício, uma superfície de custo referente à área de estudo é incluída para que as oportunidades (custos negativos) e as restrições (custos positivos) de conservação de uma área sejam consideradas. Assim, áreas com alguma característica desejável que tenham menor custo são priorizadas pelo sistema em detrimento daquela com maior custo de conservação.
A principal vantagem de se considerar o custo de conservação na escolha de áreas é diminuir o conflito na implementação. Quanto menor o custo do conjunto de áreas prioritárias escolhidas, maior é a probabilidade de sucesso na consolidação da conservação nessas áreas. Os principais conflitos ocorrem nos casos em que existe uma elevada diversidade de espécies e/ou endemismo em áreas importantes para produção agrícola, implementação de infraestrutura, ou regiões de alta densidade populacional.
3. Seleção de cenário – MARXAN
A seleção do melhor cenário baseado na escolha por programa de priorização foi a primeira etapa do processo de priorização de áreas. Esta etapa consiste em selecionar um conjunto de unidades de planejamento que atinjam as metas de conservação e tenham a melhor relação entre o custo de conservação e a borda dos remanescentes. Para o processo de seleção foi utilizado o programa Marxan (Ball, Possingham & Watts, 2009). O Marxan usa um algoritmo de otimização baseado em “simulação de tempera” (Simulated Annealig), que é uma estratégia eficiente para encontrar soluções próximas ao ótimo em problemas de grande complexidade. O algoritmo utilizado pelo Marxan usa uma função objetivo para avaliar conjuntos de unidades de planejamentos e assim buscar uma melhor solução. A função objetivo do Marxan é apresentada a seguir:
Cost = custo associado a unidade de planejamento
BML = constante que multiplica os valores de borda da tabela
Boundary = borda associada a seleção de duas unidades contíguas
CFPF = “Conservation feature penalty factor” penalidade associada ao alvo
Penalty = penalidade por não atingir a meta para um determinado alvo
Cost Threshold Penalty (t) = penalidade aplicada caso o custo exceder um limite pré-determinado
Informações técnicas sobre o funcionamento, estrutura de dados e saídas podem ser obtidos no manual do Marxan, disponível na página oficial do programa - www.uq.edu.au/marxan/.
Conheça os projetos do WWF-Brasil que envolvem PSC
- PSC Cerrado-Pantanal
- Xingu
Referências
Ball, I.R., H.P. Possingham, and M. Watts. 2009. Marxan and relatives: Software for spatial conservation prioritisation. Chapter 14: Pages 185-195 in Spatial conservation prioritisation: Quantitative methods and computational tools. Eds Moilanen, A., K.A. Wilson, and H.P. Possingham. Oxford University Press, Oxford, UK.
Margules, C. R. e R. L. Pressey. 2000. Systematic conservation planning. Nature 405: 243-253.
Rodrigues e Brooks 2007 Shortcuts for biodiversity conservation planning: The effectiveness of surrogates. Annual Review of Ecology, Evolution, and Systematics 38: 713–737.
Trindade-Filho J. e R. Loyola. 2011. Performance and Consistency of Indicator Groups in Two Biodiversity Hotspots. PlosOne 6: e19746.